
出典:日本経済新聞
みなさん、こんにちは!
今日はクボタが大阪・関西万博で公開した「世界初の無人・水素燃料電池トラクター」のニュースをご紹介します。
脱炭素と省人化を両立する挑戦ですが、私たちが注目すべきは“未来を先取りする技術”だけではなく、“現実的に普及が進む技術”です。
クボタが公開した新トラクターの特徴

出典:日本経済新聞
| 動力源 | 水素燃料電池(排出は水のみ) |
| 出力 | 100馬力級の中型タイプ |
| 特徴 | AIカメラで障害物や雑草も識別、自動運転や遠隔操作が可能 |
| 用途 | 農地内だけでなく格納庫から農地までの自動移動も可能 |
農業の「省人化×脱炭素化」を両立させる世界初の試みであり、万博ならではの“未来感”を打ち出す技術展示といえます。
実用化への課題
- 公道や農道での無人走行を認める規制改革
- 農村部での水素供給インフラ整備
- 市場投入時期は未定(まずは実証実験から)
現状では、まだ社会実装には距離がある状況です。
現実解としてのBEV農機とBESS活用

実は、すでに海外では電気駆動(BEV)の自動運転トラクターが商用化されています(例:米のMonarch Tractor)。国内でも小型モデルから普及の兆しがあります。
ここで重要なのが、出力抑制された太陽光電力をBESSに貯蔵し、農機に供給するモデルです。
これにより、
- 夜間・早朝でも充電可能
- BEV草刈り機やドローンも充電
- 「現場直結型マイクログリッド」として農業の電化を推進
が可能になります。
EPCとしては「ソーラー+BESS+BEV農機充電パッケージ」を提案でき、省人化とエネルギー地産地消を同時に実現できます。
RTK基地局と農業自動化インフラ
中期的に欠かせないのがRTK基地局の整備です。
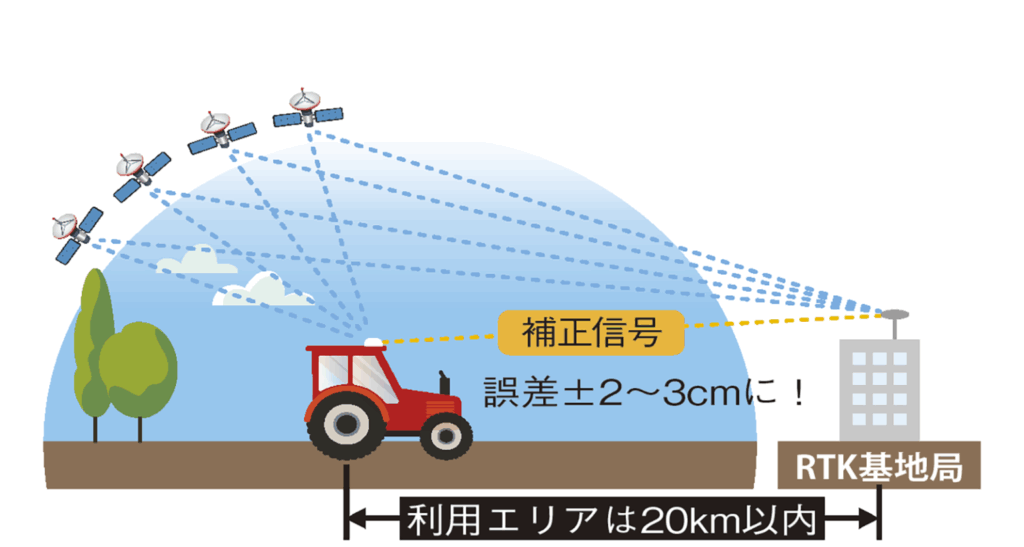
リアルタイムキネマティック(RTK)測位システムにおいて、事前に正確な位置がわかっている固定の基準局であり、衛星測位で生じる誤差をリアルタイムに補正するための情報(補正データ)を、インターネットなどを通じて移動局(ローバー)に配信する役割を担います。
この基地局からの補正情報とローバーの観測データを組み合わせることで、通常のGPS測位では数メートルの誤差が生じるところを、数センチメートル単位の高精度な測位を実現します。
- 通常のGPSは誤差が数m
- RTKは基準局からの補正データで数cm精度の測位が可能
- トラクターが直線走行や同じ畝の走行を精密に実行
- 農薬散布ドローンや水田管理にも活用
農業の自動化を支えるインフラであり、国も補助金を通じて「地域RTK基準局」の整備を後押ししています。
ソーラーシェアリングの役割拡張と地域協業
ソーラーシェアリングが単に「電気を売る」だけでなく、農地そのもので農機・ドローン・通信基盤に使う電気を供給できる存在になります。
さらに、この役割拡張は農協や自治体との協業によって加速します。
農協との連携
- BEV農機やドローンの充電拠点を共同整備し、組合員でシェア
- RTK基地局の共同利用による効率的な圃場管理
- 「再エネで育てた農産物」のブランド化や販路拡大
自治体との連携
- 農業振興と再エネ導入を一体化したモデル事業の推進
- RTKインフラの公共整備や、防災・観光・ふるさと納税との連携
- 教育・観光資源としてのGXアピール
ソーラーシェアリングは、地域の農業と社会を支える「基盤エネルギー」として、新しい展開が期待されます。
農業の未来は「段階的な自動化」
万博で披露された燃料電池トラクターは未来を示すシンボル。
しかし現実解は、BEV農機×BESSから始まり、RTKインフラ整備を経て、将来の燃料電池農機につながっていきます。
農業の自動化は一足飛びではなく、段階的に進化していく。
そして、その進化の中でソーラーシェアリングの役割は「再エネ供給」から「農業オペレーションの基盤エネルギー」へとシフトしていくのです。
